![]()
![]()
![]()
![]()
Mise Au Point Automatique
Méthode de mise au point pilotée par ordinateur
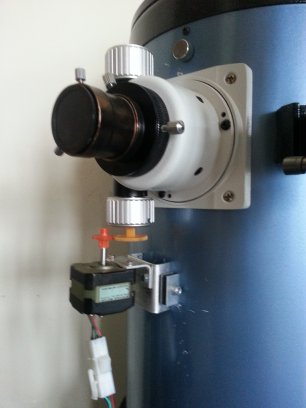
Accouplement du moteur au porte oculaire. |
Carte de pilotage USB du moteur (K8096). |
|
|
|
Animation de la mise au point. |
|
Image après mise au point |
|
|
|
|
Visualisation des effets du vent et de la turbulence |
|
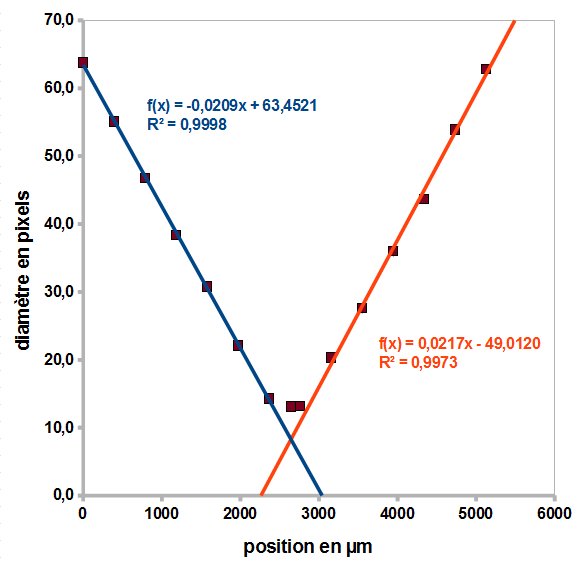
Images autour du point focal |
|
|
|
|
Le programme : map.zip
![]()
![]()
![]()
![]()